



冲压/堆垛机器人 SDCX RMD-300/200/160/120/35/08/110/20/50
技术参数
| 型号 | 自由度 | 驾驶模式 | 有效载荷(公斤) | 重复定位精度(毫米) | 活动范围(°) | 最大速度(°/s) | 腕关节允许载荷惯性(kg·m)2) | 循环节拍(周期/小时) | 运动半径(毫米) | 局部重量 (公斤) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| SDCX-RMD300 | 4 | 交流伺服驱动器 | 300 | ±0.5 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 85 | 90 | 100 | 190 | 134 | 1000③ | 3150 | 1500 |
| SDCX-RMD200 | 4 | 交流伺服驱动器 | 200 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 105 | 107 | 114 | 242 | 78 | 1300③ | 3150 | 1500 |
| SDCX-RMD160 | 4 | 交流伺服驱动器 | 160 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 123 | 123 | 128 | 300 | 78 | 1500③ | 3150 | 1500 |
| SDCX-RMD120 | 4 | 交流伺服驱动器 | 120 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 128 | 126 | 135 | 300 | 78 | 1560③ | 3150 | 1500 |
| SDCX-RMD50 | 4 | 交流伺服驱动器 | 50 | ±0.2 | ±178 | ± +90~-40 | ± +65~-78 | ±360 | 171 | 171 | 171 | 222 | 4.5 | 1700② | 2040 | 660 |
| SDCX-RMD20 | 4 | 交流伺服驱动器 | 20 | ±0.08 | ±1170 | ± +115~-25 | ± +70~-90 | ±360 | 170 | 170 | 185 | 330 | 0.51 | 1780① | 1720 | 256 |
| SDCX-RMD08 | 4 | 交流伺服驱动器 | 8 | ±0.08 | ±170 | ± +90~-40 | ± +68~-90 | ±360 | 251 | 195 | 195 | 367.5 | 0.25 | 1800① | 1433 | 180 |
评论:
① 测试轨道高 150 毫米,宽 1000 毫米,实际循环时间受实际工作条件的影响;
② 测试轨道高 200 毫米,宽 1000 毫米,实际循环时间受实际工作条件的影响;
③ 测试轨道高 400 毫米,宽 2000 毫米,实际循环时间受实际工作条件的影响;
避免接触易燃、易爆和腐蚀性气体及液体;避免被水、油和灰尘溅到;远离电噪声源(等离子体)。
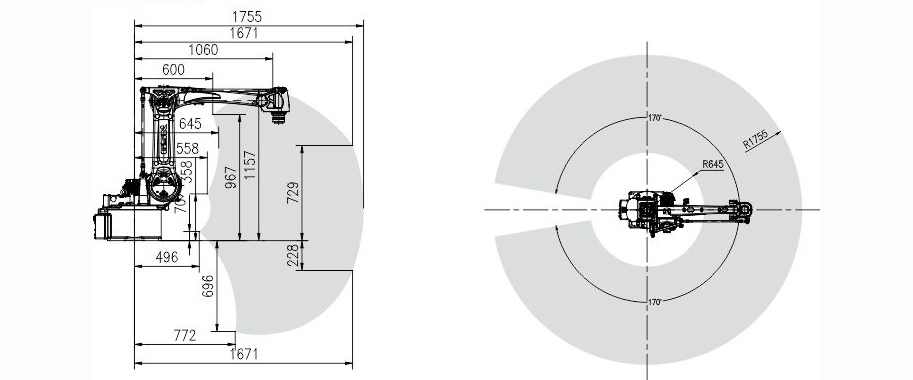
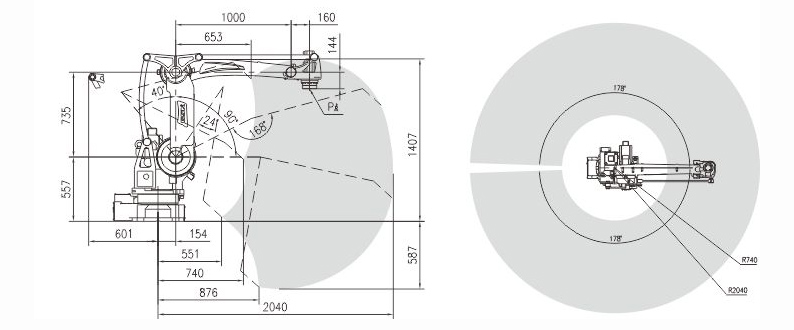
活动范围
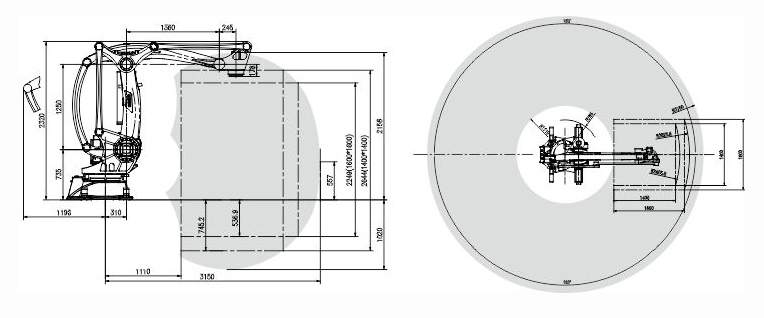
SDCX-RMD300/200/160/120 的运动范围图
SDCX-RMD20的运动范围图
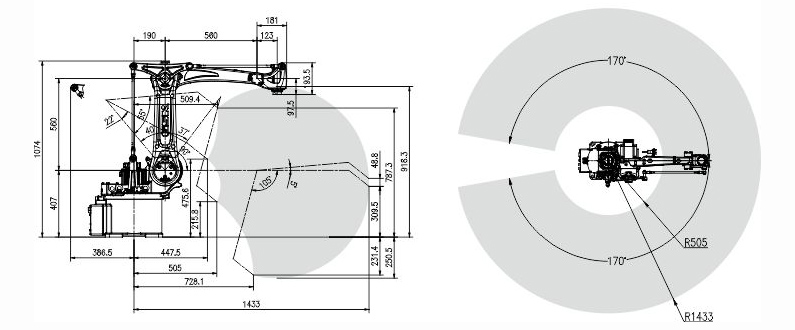
SDCX-RMD08的运动范围图
SDCX-RMD50的运动范围图
产品应用展示
解决方案
钢卷处理工程技术方案












