



三轴水平旋转定位器/焊接机器人定位器
技术参数
| 垂直翻转三轴伺服定位器 | 水平旋转三轴伺服定位器 | ||||||
| 序列号 | 项目 | 范围 | 范围 | 评论 | 范围 | 范围 | 评论 |
| 1 | 额定负载 | 500公斤 | 1000公斤 | 在第二轴半径 R400mm 范围内 | 500公斤 | 1000公斤 | 在第二轴半径 R400mm/R500mm 范围内 |
| 2 | 主轴的标准回转半径 | R1200毫米 | R1500毫米 | R1200毫米 | R1800毫米 | ||
| 3 | 副轴的标准回转半径 | R400毫米 | R500毫米 | R400毫米 | R500毫米 | ||
| 4 | 第一轴翻转角 | ±180° | ±180° | ±180° | ±180° | ||
| 5 | 第二轴旋转角度 | ±360° | ±360° | ±360° | ±360° | ||
| 6 | 第一轴的额定上转速度 | 50°/S | 24°/S | 50°/S | 24°/S | ||
| 7 | 第二轴的额定转速 | 70°/S | 70°/S | 70°/S | 70°/S | ||
| 8 | 重复定位精度 | ±0.10毫米 | ±0.20毫米 | ±0.10毫米 | ±0.20毫米 | ||
| 9 | 位移框架的边界尺寸(长×宽×高) | 2200毫米×800毫米×90毫米 | 3200毫米×1000毫米×110毫米 | 2200毫米×800毫米×90毫米 | 3200毫米×1000毫米×110毫米 | ||
| 10 | 位置转换器整体尺寸(长×宽×高) | 4000毫米×700毫米×1650毫米 | 5200毫米×1000毫米×1850毫米 | 4000毫米×700毫米×1650毫米 | 4500毫米×3600毫米×1750毫米 | ||
| 11 | 第一轴旋转的中心高度 | 1350毫米 | 1500毫米 | 800毫米 | 1000毫米 | ||
| 12 | 电源条件 | 三相 200V±10% 50Hz | 三相 200V±10% 50Hz | 三相 200V±10% 50Hz | 三相 200V±10% 50Hz | 带隔离变压器 | |
| 13 | 绝缘等级 | H | H | H | H | ||
| 14 | 设备净重 | 约1800公斤 | 约3000公斤 | 约2000公斤 | 约2000公斤 | ||
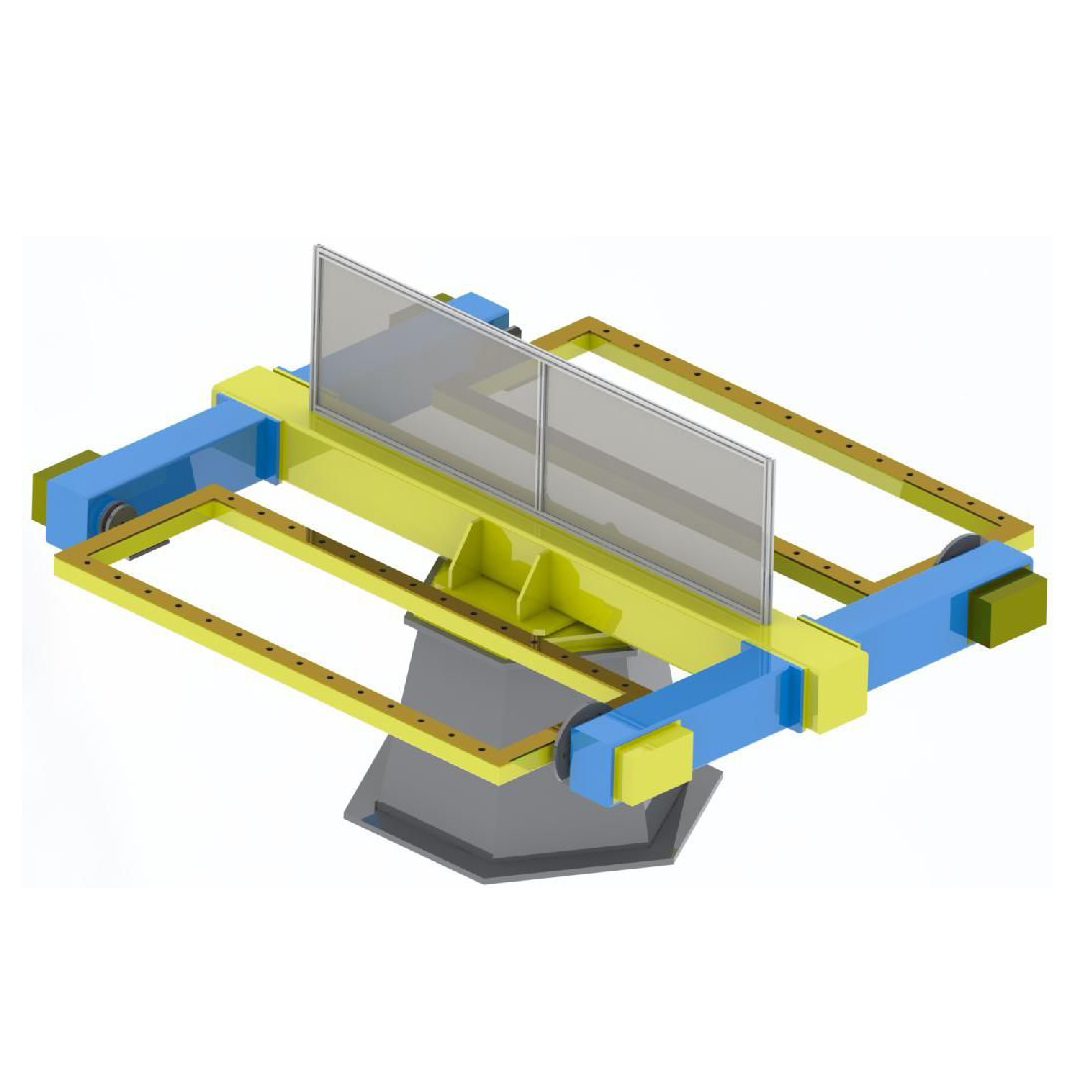
水平旋转三轴伺服定位器

垂直翻转三轴伺服定位器
结构介绍
三轴垂直翻转伺服定位器主要由焊接整体框架、翻转位移框架、交流伺服电机和RV精密减速器、旋转支架、导电机构、防护罩和电气控制系统组成。
焊接一体式框架采用优质型材焊接而成。经退火和应力消除处理后,由专业机械加工部门进行加工,以确保加工精度和关键位置的准确性。表面喷涂防锈外观漆,美观大方,颜色可根据客户要求定制。
翻转位移框架应采用优质型钢焊接,并经专业机械加工。表面应加工有用于安装定位工具的标准螺纹孔,并进行喷漆、发黑和防锈处理。
采用带RV减速器的交流伺服电机作为动力机构,可保证旋转稳定性、定位精度和
使用寿命长,故障率低。导电机构采用黄铜材质,导电效果良好。导电底座采用整体绝缘设计,可有效保护伺服电机、机器人和焊接电源。
该电气控制系统采用日本欧姆龙PLC控制定位器,性能稳定,故障率低。电气元件均选用国内外知名品牌,确保质量和使用稳定性。
遮光罩由铝型材和铝塑板组装而成,用于防止焊接和切割过程中产生的电弧光。








